YOLO algorithm
“YOLO may not be the best detector, but it is the most colorful one.”
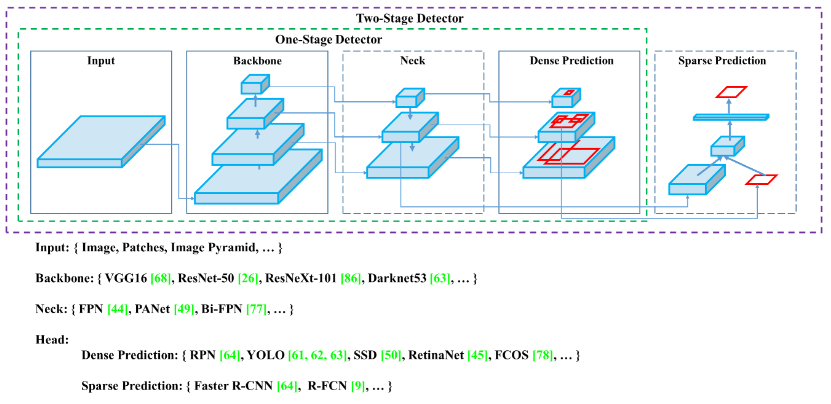
single-shot vs two-shot:
end-to-end/single-shot detector: both detection and classification
looking for specific bounding boxes
vs two-shot/two-stage: first draw bounding box, then classify it
yolo’s contribution:
all focus on speed
single-shot detector
- like object localization task (vs sliding window):
- output bounding boxes of any aspect ratio
- output more precise coordinates that aren’t just dictated by the stripe size of the sliding window classifier
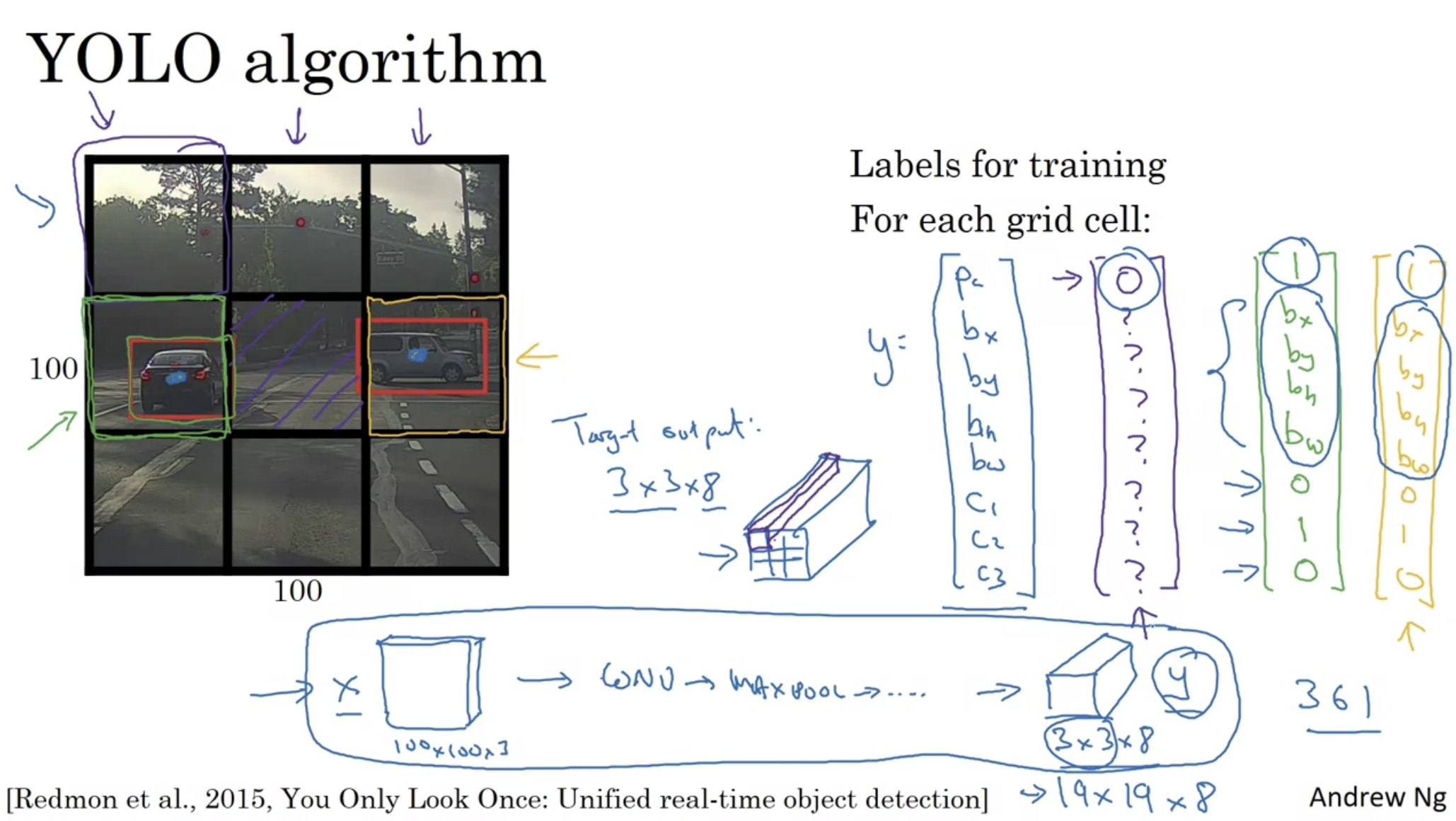
- convolutional implementation: choose the conv layers and the max pool layers so that this eventually maps to a 3 by 3 by 8 output volume.
- can extract information $p_c$, bounding box coordinates $b_x, b_y, b_h, b_w$ and class labels $c_1,c_2,c_3$ from each $\mathbf y$
problems
multiple object assigned to one grid cell?
- use finer grid to reduce chance
one instance across grid
-
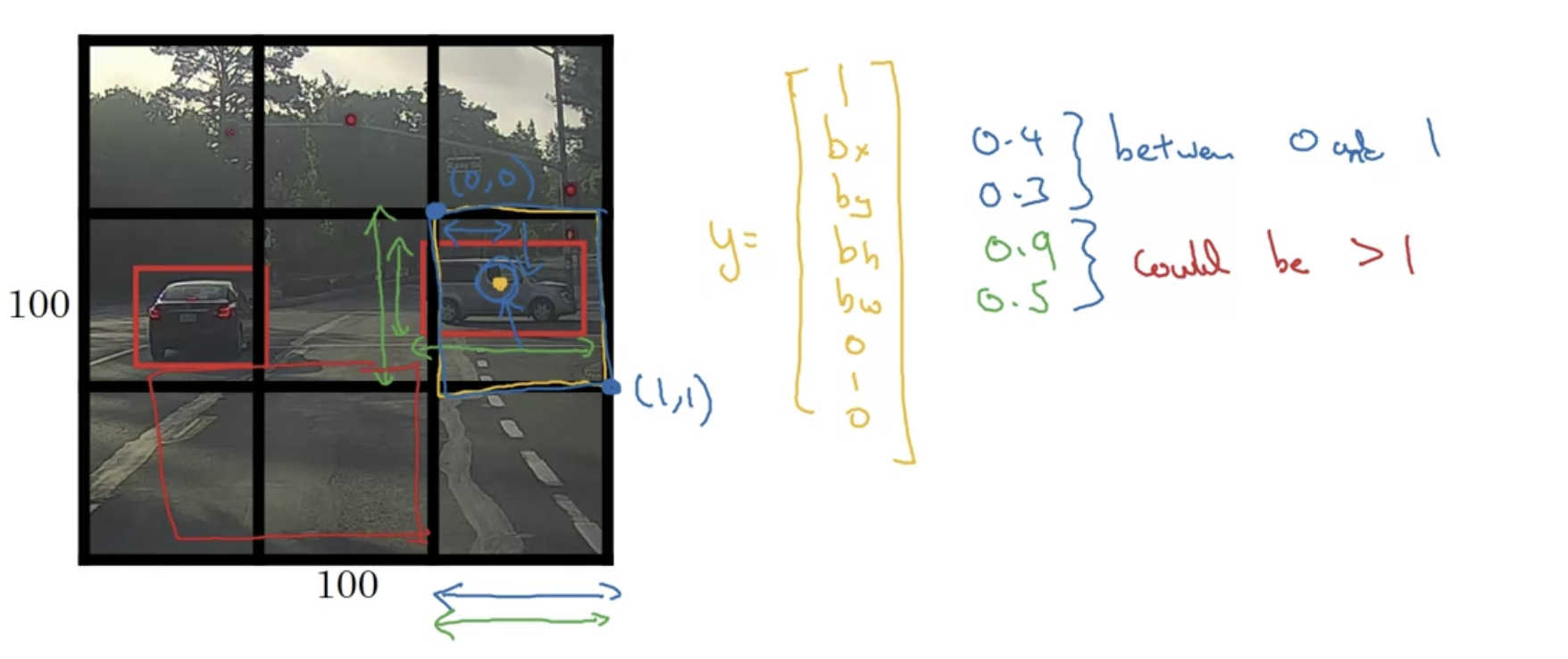
assign object to grid cell by its midpoint
-
can go across grid(bw, bh > 1)
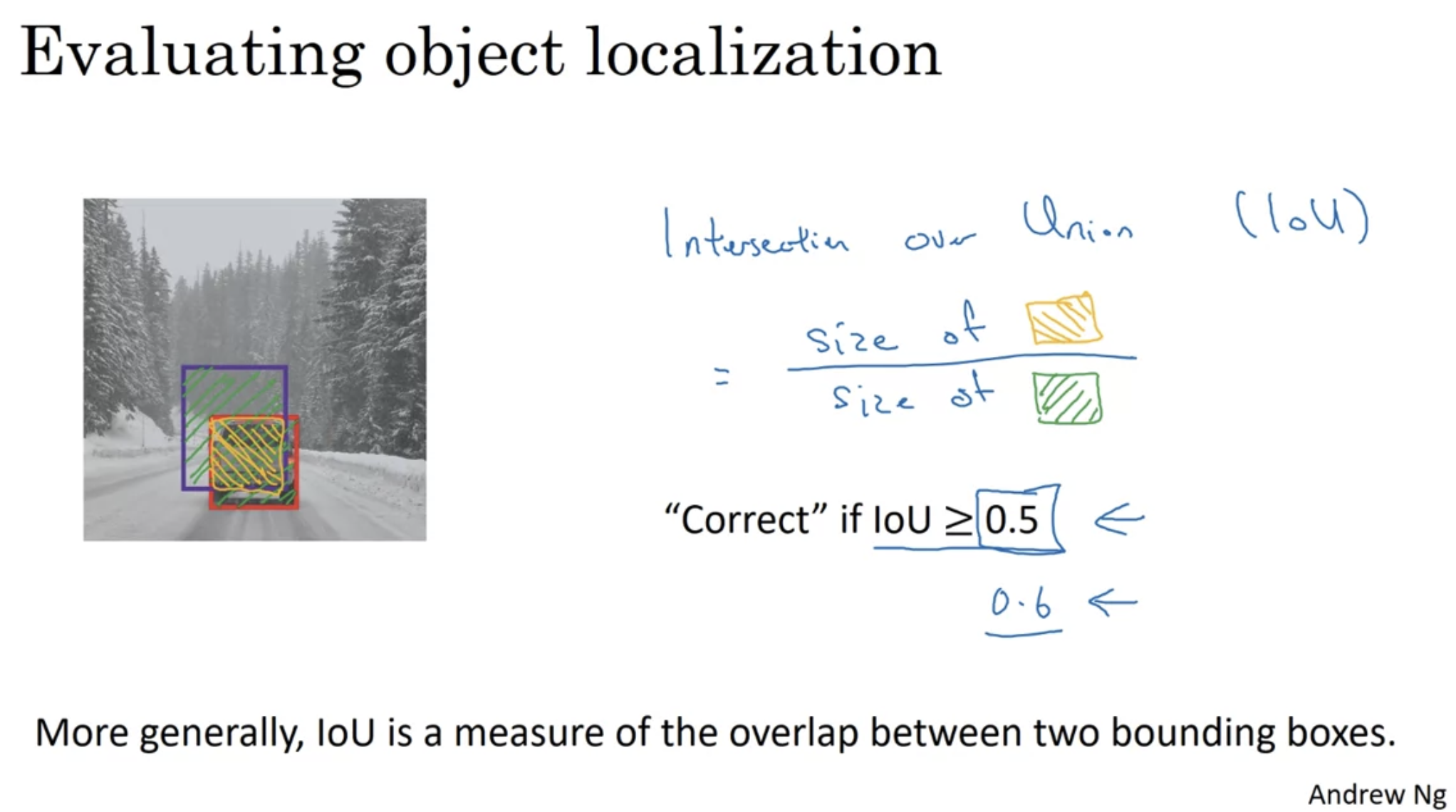
IoU (Intersection over Union)
Non-max Suppresion
make sure each object is detected only once
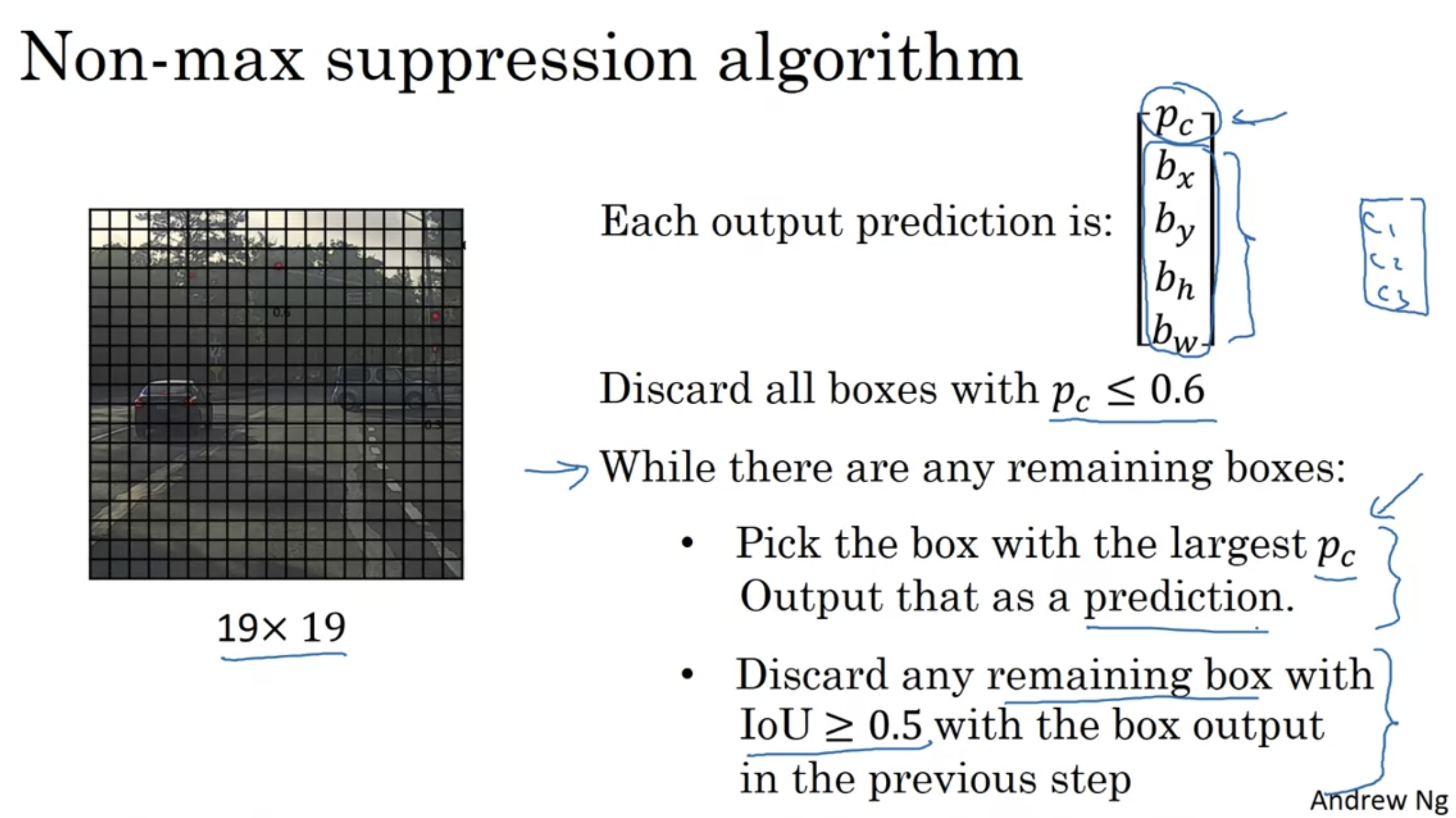
problem: calculate probability for each class i: $p_{i} = p_c \cdot c_i$
Weekly Assignment - Car detection with YOLO
Anchor boxes
detect overlapping objects
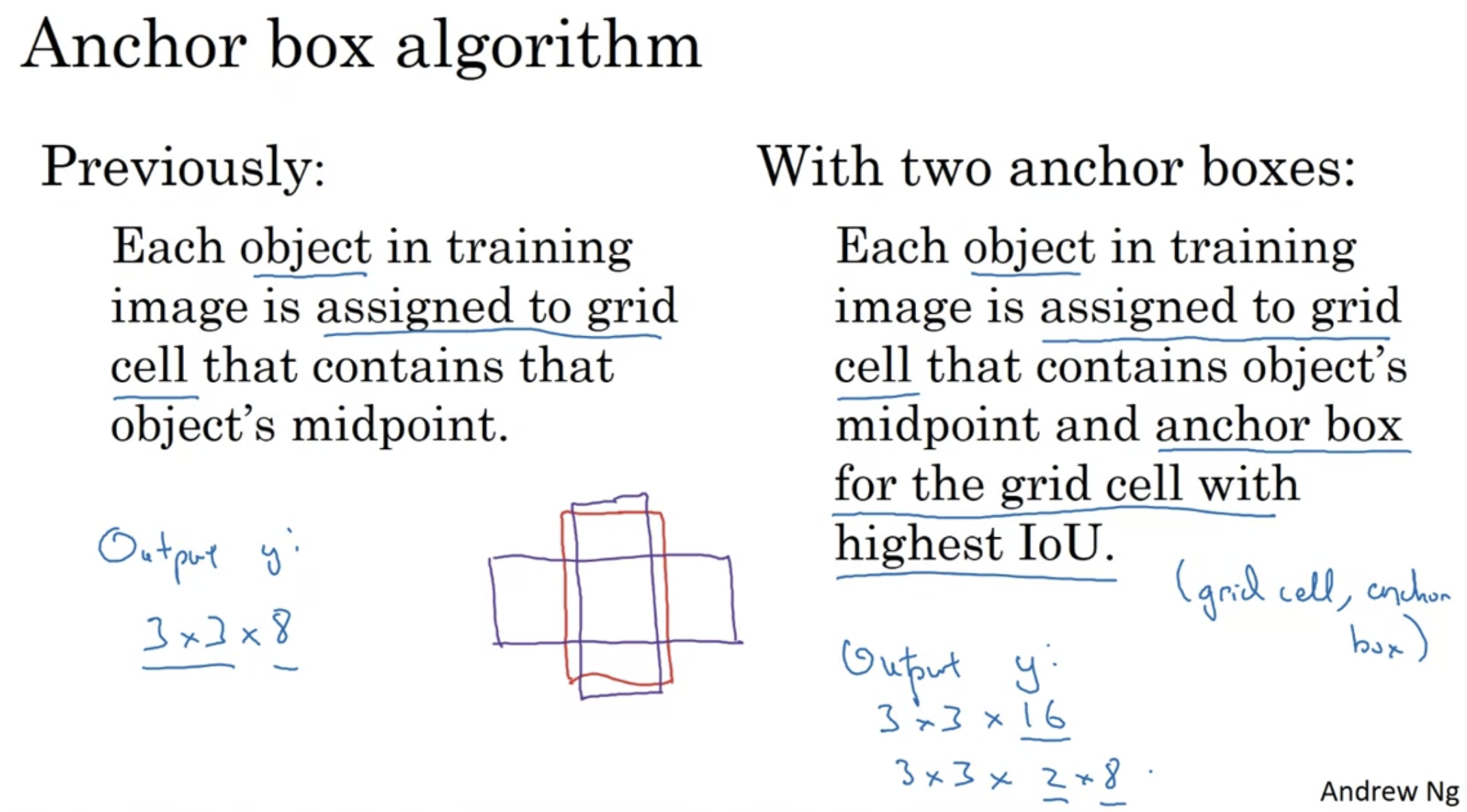
problem:
- three objects but two anchor boxes
- two object with exactly same-shape anchor box
- later YOLO version: k-means to find similar-shape objects
more for specification
in practice, this does not happens often in 19 by 19 grid cell
Detection model architecture
A detection model contains a backbone, neck, head module.
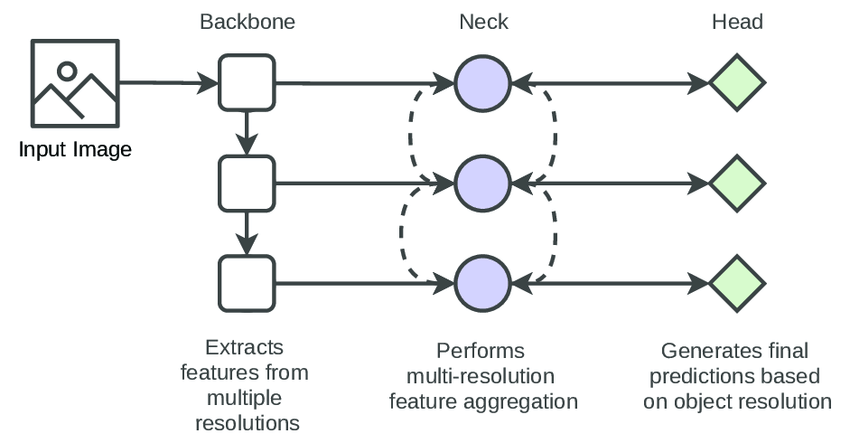
- **backbone: **exploits the essential features of different resolutions
- **neck: ** fuses the features of different resolutions.
- **multiple head modules: ** perform the detection of objects in different resolutions.
Incremental Improvements
Different YOLO versions under 10 mins - YouTube
v1-v3 introduced by Joseph Redman, later Alex and Glenn
yolo v1
original resolution
limitation:
“all things equall”: struggle with small objects, especially further from frames
cap for number of classes: cannot have more than 10 objects in a row
yolo v2 (yolo-9000)
“faster, better, stronger”
better
BN layer
higher resolution classifier -> 448
anchor box
dimension clutters using k-means
fine-grained features
Darknet-19
(all FC layer removed – faster)
hierachical classification – stronger
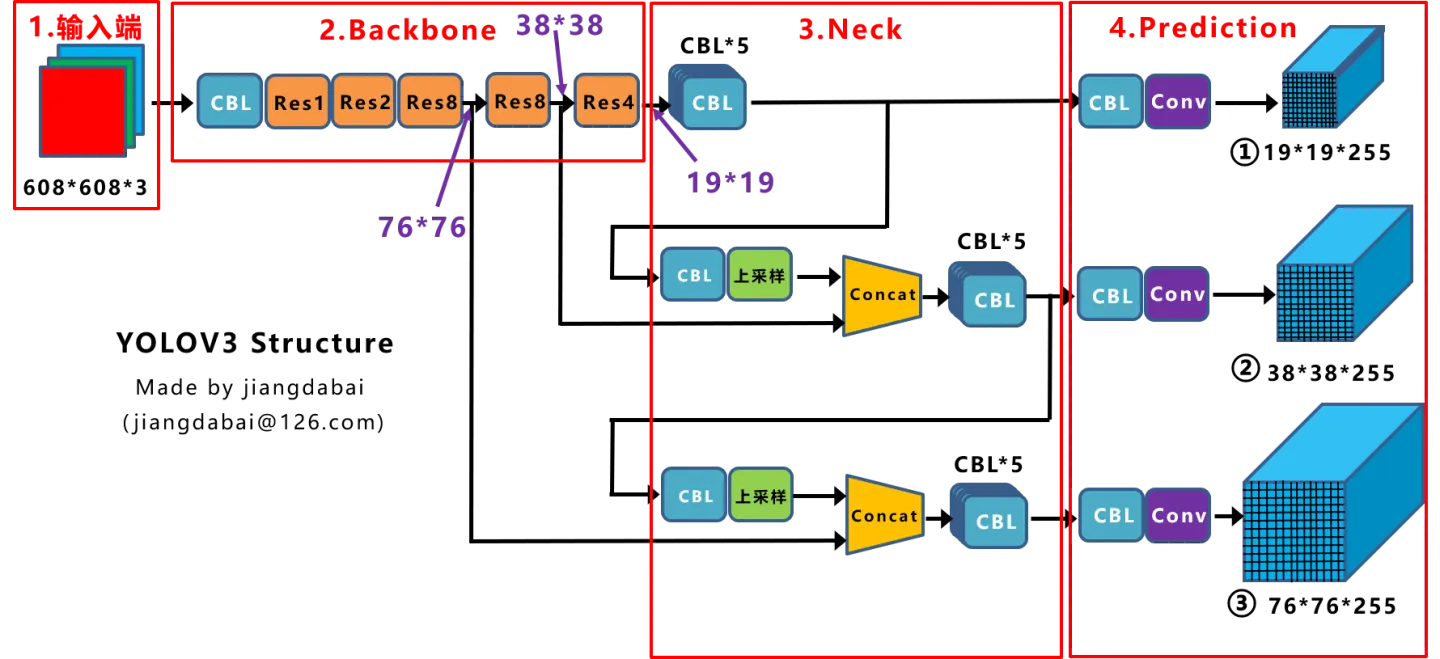
yolo v3
darknet-53 as feature extractor
residual connections Alphago paper graph
implemented in other framework(keras); connect to pytorch by Glenn Jocher for particle research
yolo v4
data augmentation and preprocessing
also in other framework;
CSPNet
yolo v5
Object Detection Algorithm — YOLO v5 Architecture - by Surya Gutta - Analytics Vidhya
(no paper, just a github repo)
fully implemented on pytorch by Glenn Jocher
getting to production quickly: ease-of-use, exportabiity, memory requirements, speed, mAP, market size
non-sequential, a community that all forks make contribution to it
DarkNet
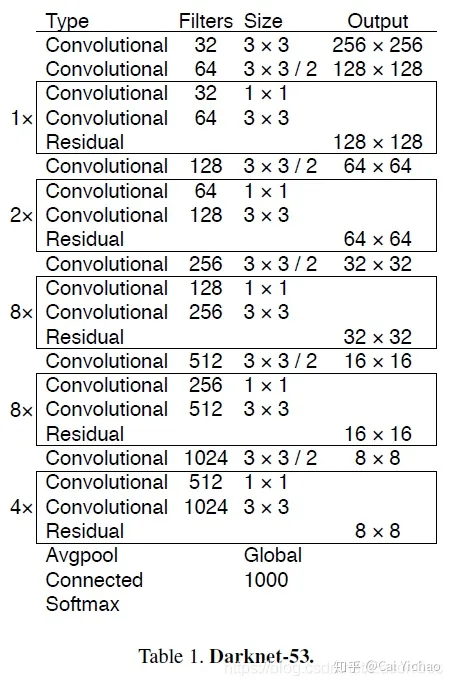
基本结构:Residual Block
- block:1x1卷积层 + 3x3卷积层,比ResNet的bottleneck block少了后面的1x1卷积层;第二层kernel数量是第一层的两倍。
- activation: leaky_relu
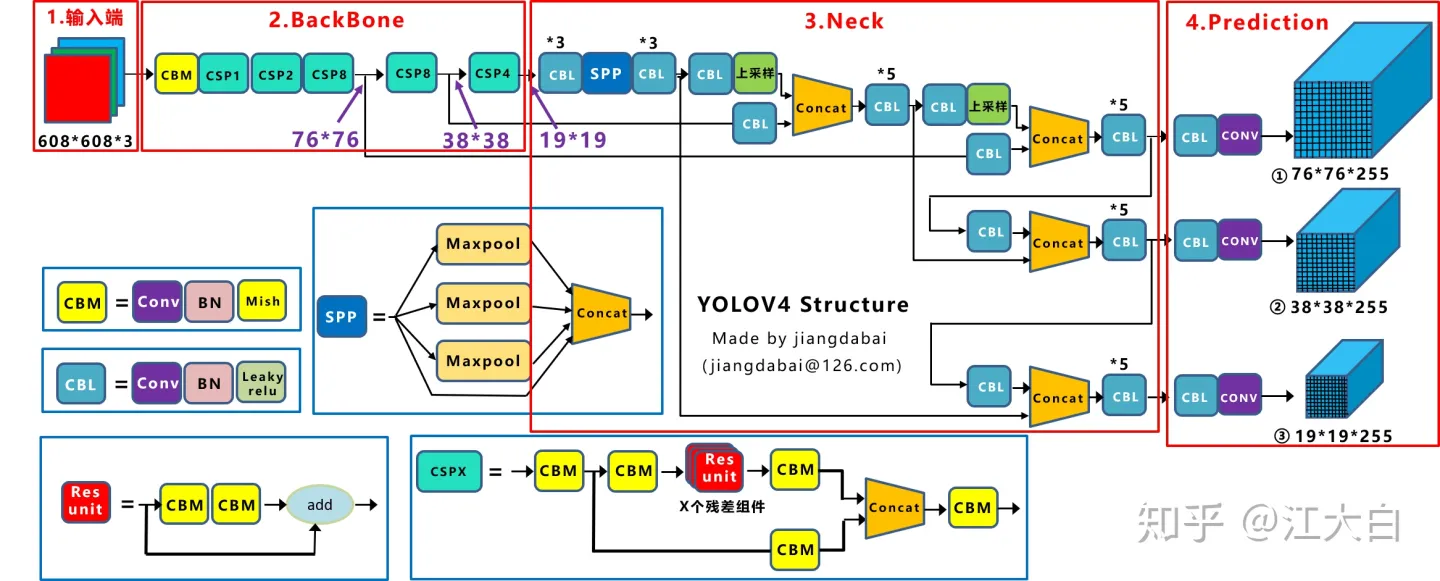
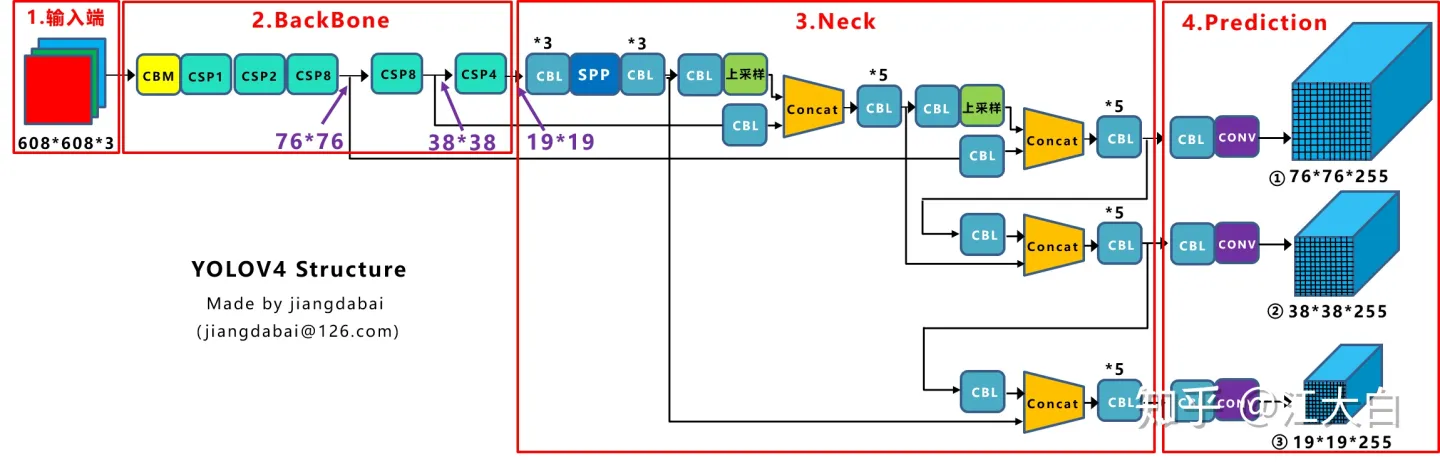
YoloV4
深入浅出Yolo系列之Yolov3&Yolov4&Yolov5&Yolox核心基础知识完整讲解 - 知乎
- 输入端:这里指的创新主要是训练时对输入端的改进,主要包括Mosaic数据增强、cmBN、SAT自对抗训练
- BackBone主干网络:将各种新的方式结合起来,包括:CSPDarknet53、Mish激活函数、Dropblock
- Neck:目标检测网络在BackBone和最后的输出层之间往往会插入一些层,比如Yolov4中的SPP模块、FPN+PAN结构
- Prediction:输出层的锚框机制和Yolov3相同,主要改进的是训练时的损失函数CIOU_Loss,以及预测框筛选的nms变为DIOU_nms
输入数据
大小:$6086083$
Mosaic数据增强
问题:
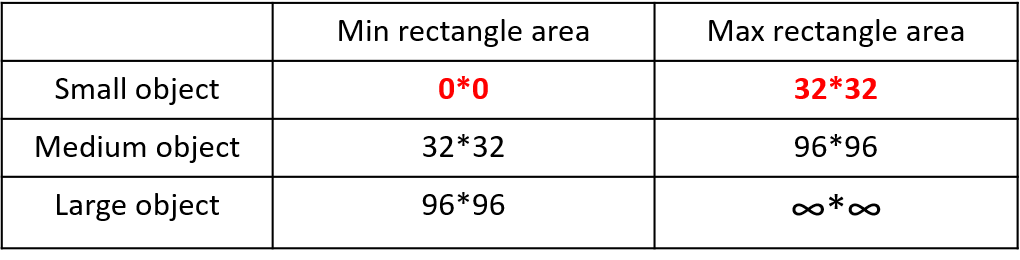
- 小目标(定义为32*32以下的目标)预测难度大,AP普遍比中大目标低;
- 同时Coco数据集上小目标数量多,分布不均。

为解决小目标预测的问题,作者采用了Mosaic数据增强的方式:
- 丰富数据集:随机使用4张图片,随机缩放,再随机分布进行拼接,大大丰富了检测数据集,特别是随机缩放增加了很多小目标,让网络的鲁棒性更好。
- 减少GPU:可能会有人说,随机缩放,普通的数据增强也可以做,但作者考虑到很多人可能只有一个GPU,因此Mosaic增强训练时,可以直接计算4张图片的数据,使得Mini-batch大小并不需要很大,一个GPU就可以达到比较好的效果。
此外,发现另一研究者的训练方式 **也值得借鉴,采用的数据增强和Mosaic比较类似,也是使用4张图片(不是随机分布),但训练计算loss时,采用“缺啥补啥**”的思路:
如果上一个iteration中,小物体产生的loss不足(比如小于某一个阈值),则下一个iteration就用拼接图;否则就用正常图片训练,也很有意思。
Backbone
CSP
CSPDarkNet as Backbone
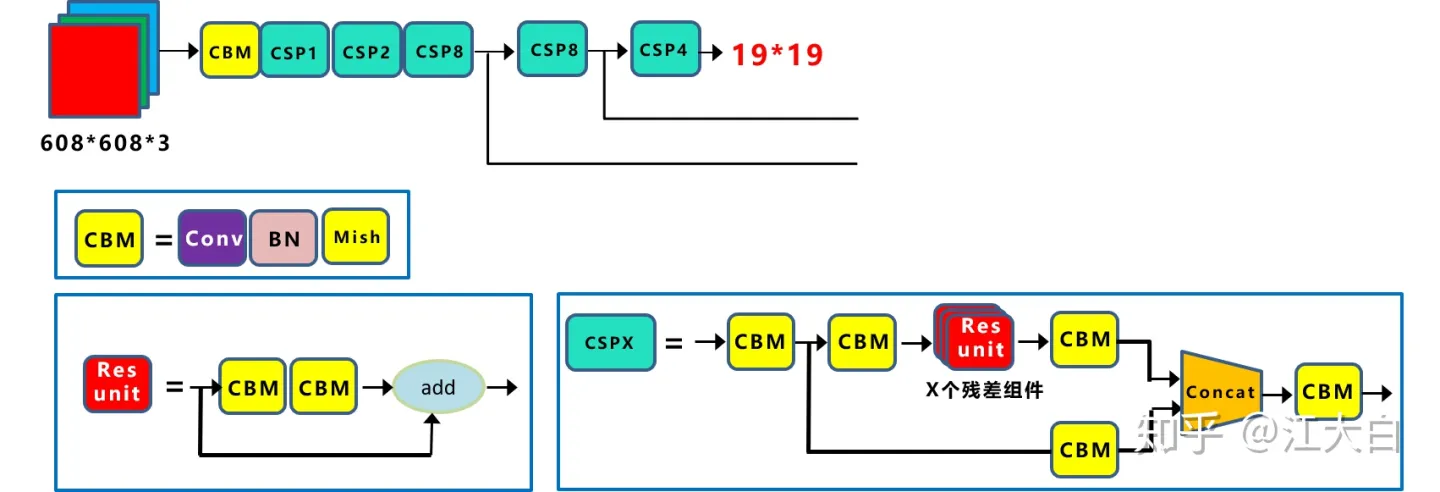
CSPDarknet53是在Yolov3主干网络Darknet53的基础上,借鉴2019年CSPNet的经验,产生的Backbone结构,其中包含了5个CSP模块。
每个CSP模块前面的卷积核的大小都是3*3,stride=2,因此可以起到下采样的作用。
因为Backbone有5个CSP模块,输入图像是608*608,所以特征图变化的规律是:608->304->152->76->38->19
经过5次CSP模块后得到19*19大小的特征图。
而且作者只在Backbone中采用了Mish激活函数,网络后面仍然采用Leaky_relu激活函数。
Cross Stage Partial DenseNet
CSPNet全称是Cross Stage Paritial Network,主要从网络结构设计的角度解决推理中从计算量很大的问题。
CSPNet的作者认为推理计算过高的问题是由于网络优化中的梯度信息重复导致的。
因此采用CSP模块先将基础层的特征映射划分为两部分,然后通过跨阶段层次结构将它们合并,在减少了计算量的同时可以保证准确率。
problem: DenseNet - duplicate gradient information
-
DenseNet concatenate input and output of layer i as input of layer i+1

-
during BP, lots of gradients information are reused


-
separates feature map of the base layer into two part
- HOW to seperate?
- one part will go through a dense block and a transition layer;
- the other one part is then combined with transmitted feature map to the next stage.
- The gradients coming from the dense layers are separately integrated.
-
The proposed CSPDenseNet preserves the advantages of DenseNet’s feature reuse characteristicsbut at the same time prevents an excessively amount of duplicate gradient information by truncating the gradient flow.


Partial Dense Block Variants

two variants for partial trainsition layers to maximize the difference of gradient combination:
- Fusion First: concatenate two parts, then trainsion
- a large amount of gradient information will be reused
- Fusion Last: dense block go through transition first, then concatenate
- gradient information will *not* be reused since the gradient flow is *truncated*.
- computation cost significantly dropped, accuracy ~same
Applying CSPNet to Other Architectures

Mish激活函数
\[LeakyRelu(x) = \begin{cases} x \ & \text{if} \ x>0 \\ \lambda x \ & \text{if} \ x<=0\end{cases} \\ \\ \begin{align} Mish(x) & = x \cross \tanh(softplus(x)) \\ & = x \cross \tanh(\ln(1+ e^x)) \end{align}\]- non-monotonic
- first derivative behavior may be acting as a regularizer
- 处处平滑
- 无正向边界,避免饱和
Dropblock
目标–正则化
传统的Dropout:随机删除减少神经元的数量,使网络变得更简单。
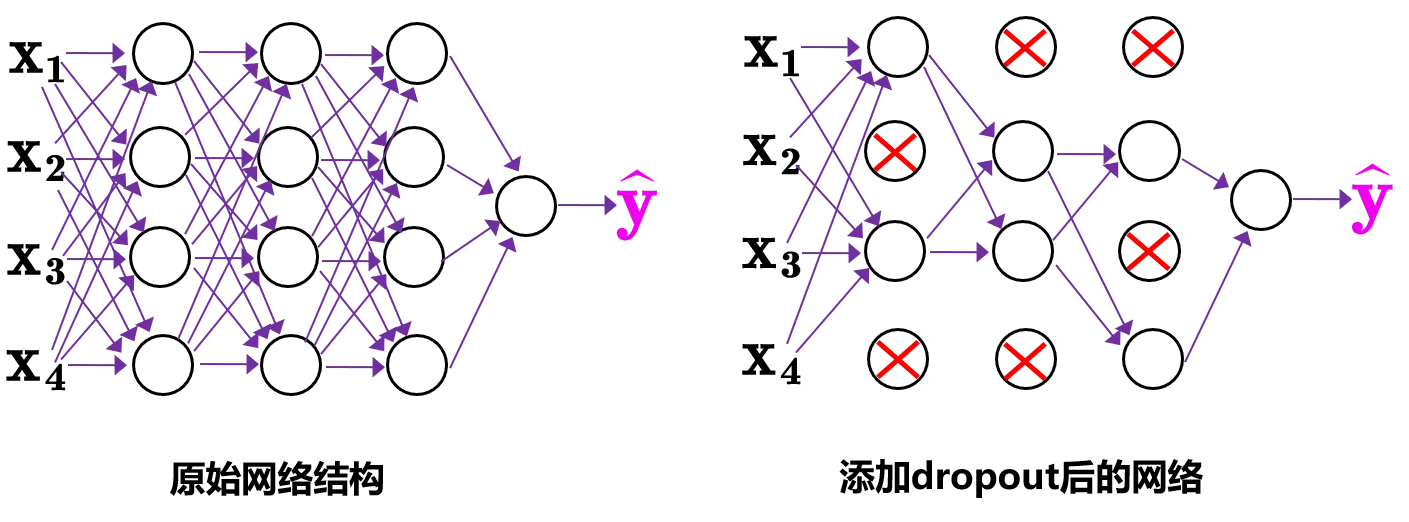
而Dropblock和Dropout相似,比如下图:
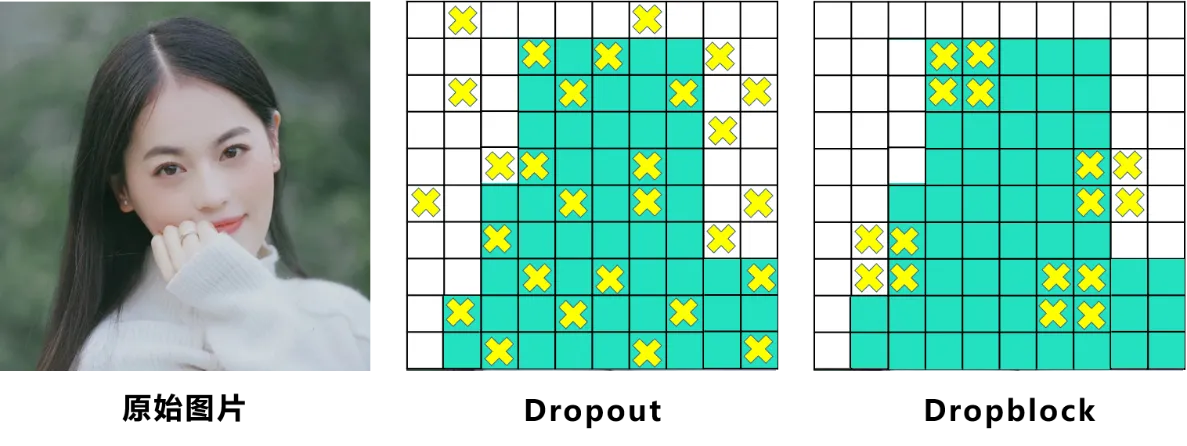
Dropblock实现借鉴了Dropout和Cutout的优势:
-
Dropout: 单个神经元随机丢弃
-
卷积层对于Dropout这种随机丢弃并不敏感:
因为卷积层通常是三层连用:卷积+激活+池化层,池化层本身就是对相邻单元起作用。而且即使随机丢弃,卷积层仍然可以从相邻的激活单元学习到相同的信息。
-
因此,Dropout在卷积层上效果并不好
-
-
Dropblock: 整个局部区域进行删减丢弃。
-
借鉴2017年的cutout数据增强
-
cutout: 将输入图像的部分区域清零,而Dropblock则是将Cutout应用到每一个特征图。
-
而且并不是用固定的归零比率,而是在训练时以一个小的比率开始,随着训练过程线性的增加这个比率。

-
-
-
优势:
- Dropblock效果优于Cutout
- Cutout只能作用于输入层,而Dropblock则是将Cutout应用到网络中的每一个特征图上
- 可以定制各种组合,在训练的不同阶段可以修改删减的概率,从空间层面和时间层面和Cutout相比都有更精细的改进。
Yolov4中直接采用了更优的Dropblock,对网络的正则化过程进行了全面的升级改进。
Neck
目标检测领域,为了更好的提取融合特征
SPP
SPP - Spatial Pyramid Pooling 空间金字塔池化
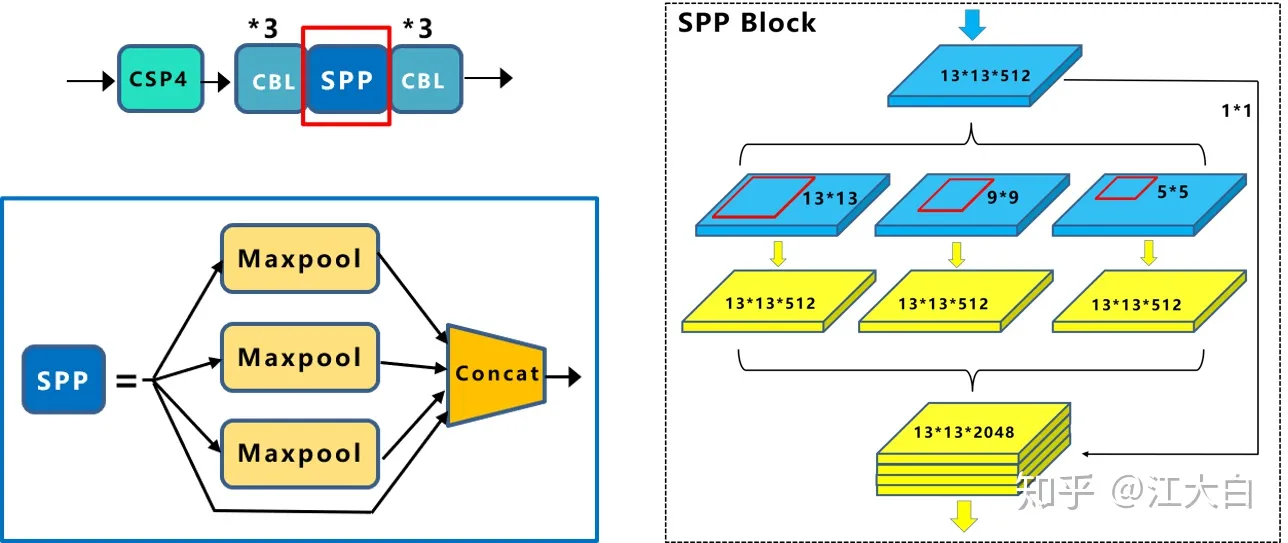
- 使用k={11,55,99,1313}的max pooling
- padding=same, stride=1, 所以输入输出特征图大小相同
- 再将不同尺度的特征图进行Concat操作
vs单纯使用k*k最大池化的方式:更有效的增加主干特征的接收范围,显著的分离了最重要的上下文特征。
PFN+PAN
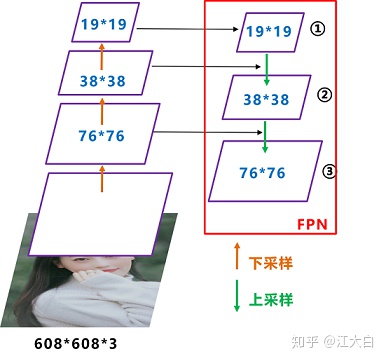
最后的Prediction中用于预测的三个特征图①19*19*255、②38*38*255、③76*76*255。[注:255表示80类别(1+4+80)×3=255]
FPN:自顶向下,将高层的特征信息通过上采样的方式进行传递融合,得到进行预测的特征图。
和Yolov3的FPN层不同,Yolov4在FPN层的后面还添加了一个自底向上的特征金字塔。
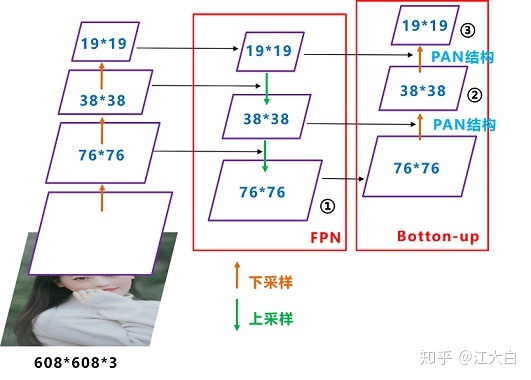
这样结合操作,FPN层自顶向下传达强语义特征,而特征金字塔则自底向上传达强定位特征,两两联手,从不同的主干层对不同的检测层进行参数聚合,这样的操作确实很皮。
Prediction
Bounding Box Loss
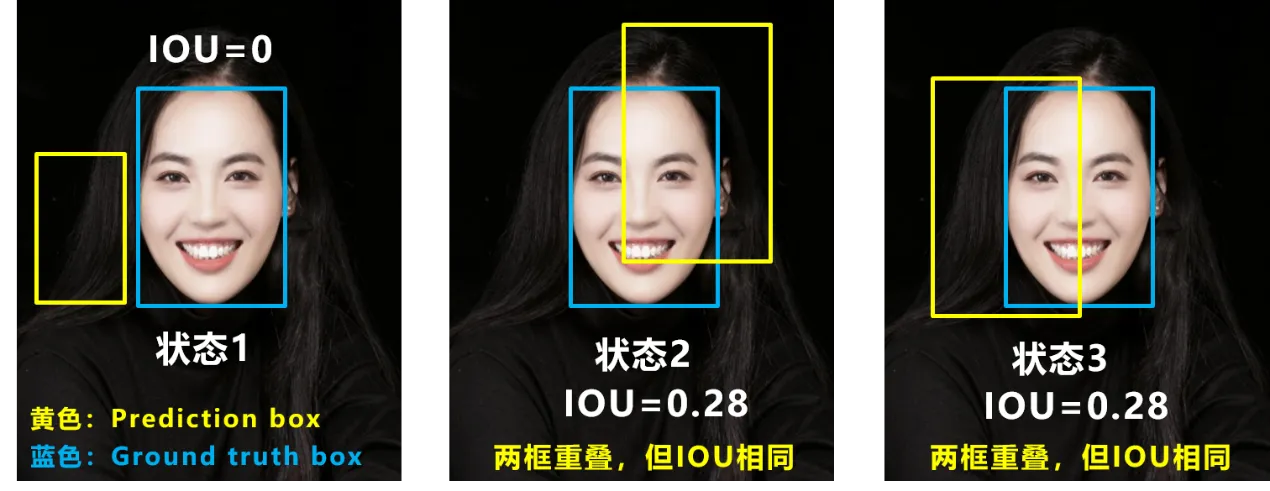
IOU_loss =1- IOU
问题:
-
(状态1)预测框和目标框不相交,loss=0且不可导,无法优化
-
(状态2和3)预测框面积相等且重叠面积相等,则无法区分两者相交情况的不同。
GIOU_Loss
缓解了一部分IoU Loss的尴尬
- 不重叠:loss>1,越远loss越大
- 重叠面积相等:外框和差集不相等,可区分
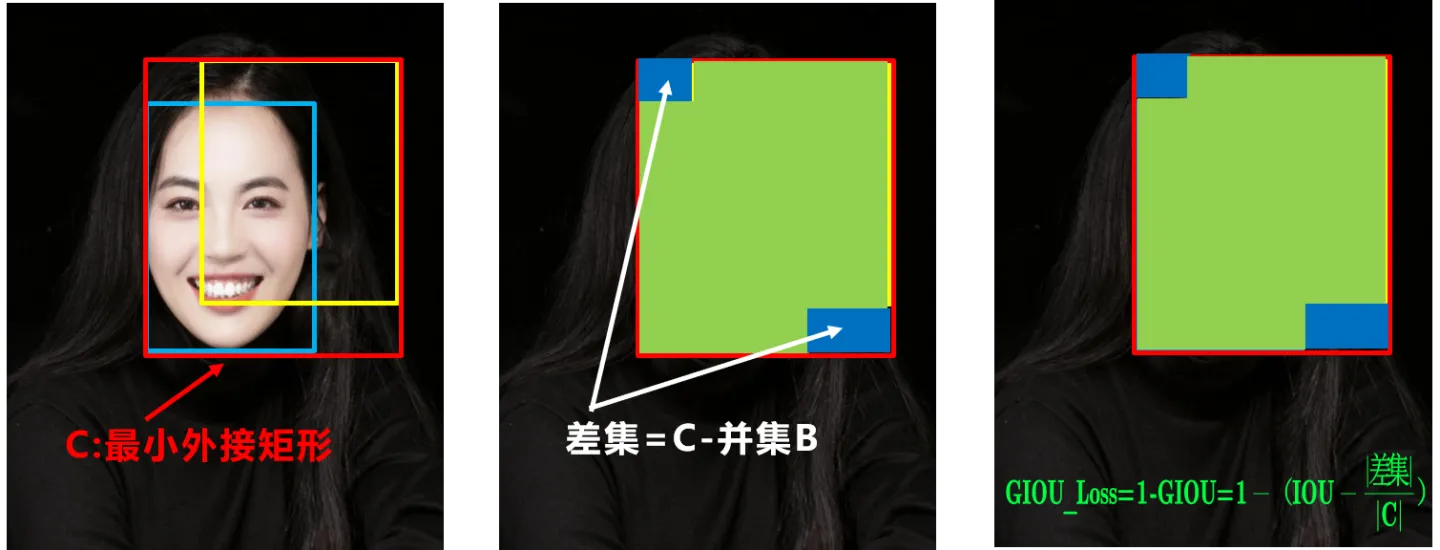
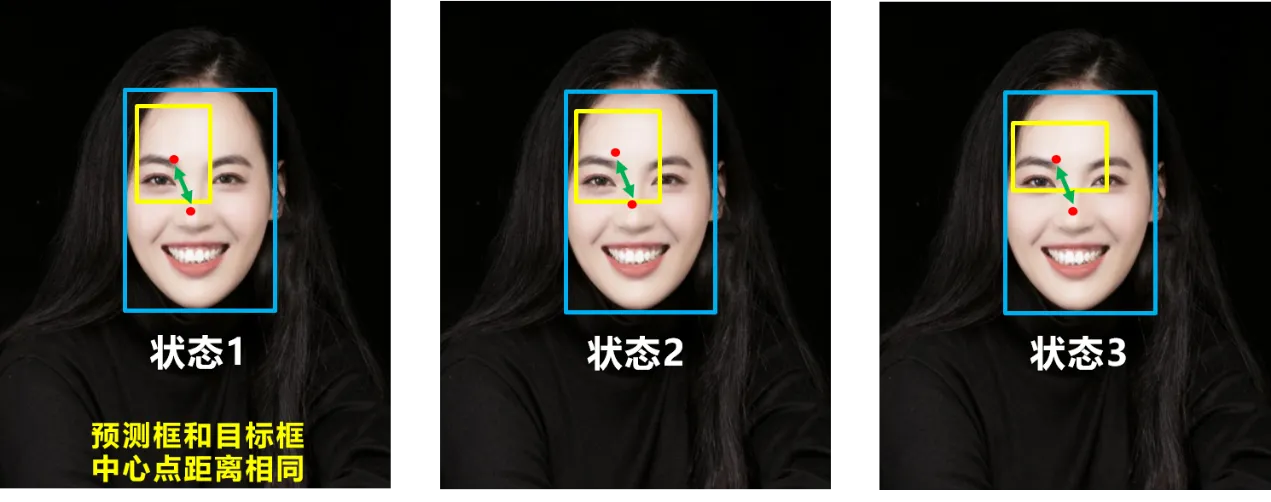
问题:预测框在目标框内且大小相同,这时差集也相同,GIOU无法区分相对位置关系。
DIOU_loss
DIOU_Loss:在IOU和GIOU的基础上,考虑边界框中心点距离的信息。
好的目标框回归函数应该考虑三个重要几何因素:重叠面积、中心点距离,长宽比。
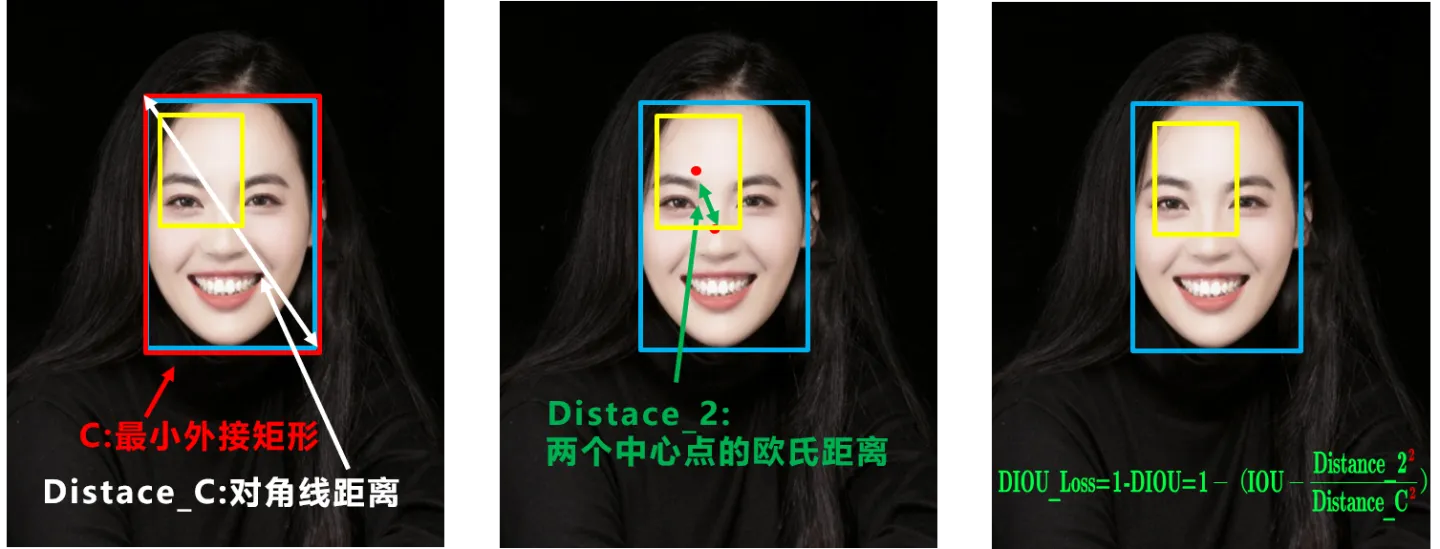
DIOU_Loss考虑重叠面积和中心点距离:
$\text{DIOU Loss} = 1-(IOU-\frac{distance_2 }{distance_C})$
-
(相当于对中心点距离归一化处理)
-
distance_2: 中心点距离
-
distance_C: 最小外接矩形的对角线距离
缺点:没有考虑到长宽比
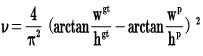
CIOU_Loss

其中$v$是衡量长宽比一致性的参数,我们也可以定义为:
IOU_Loss的演化历程
IOU_Loss:主要考虑检测框和目标框重叠面积。
GIOU_Loss:在IOU的基础上,解决边界框不重合时的问题。
DIOU_Loss:在IOU和GIOU的基础上,考虑边界框中心点距离的信息。
CIOU_Loss:在DIOU的基础上,考虑边界框宽高比的尺度信息。
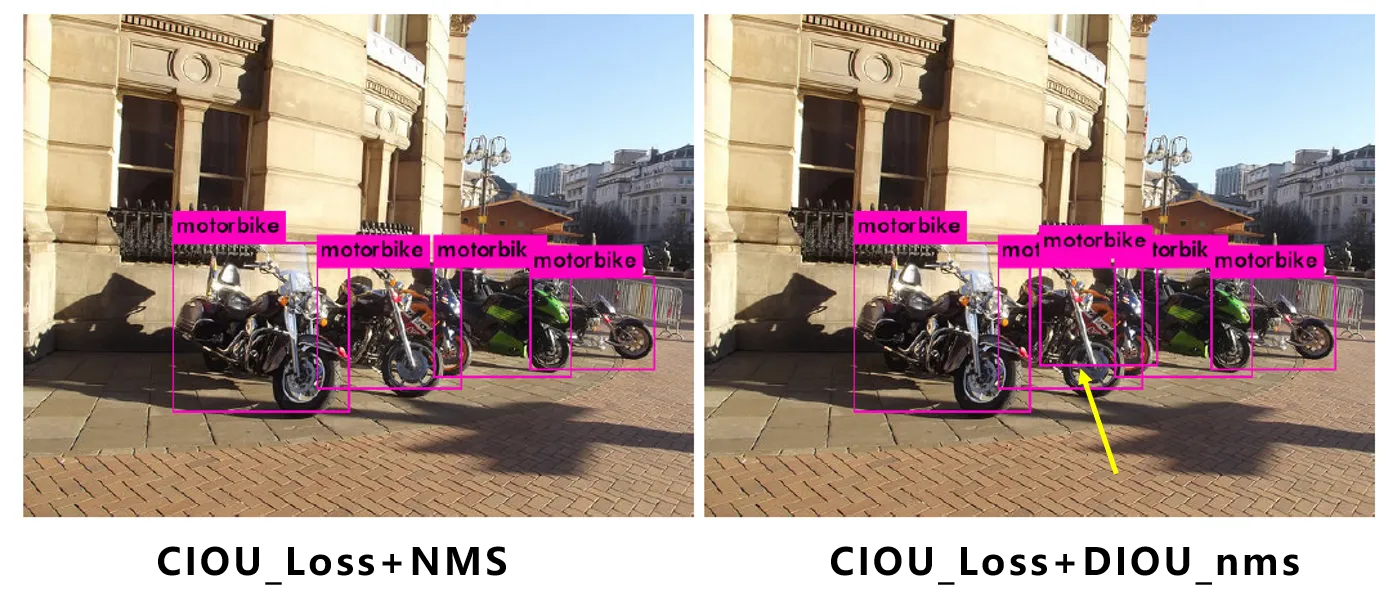
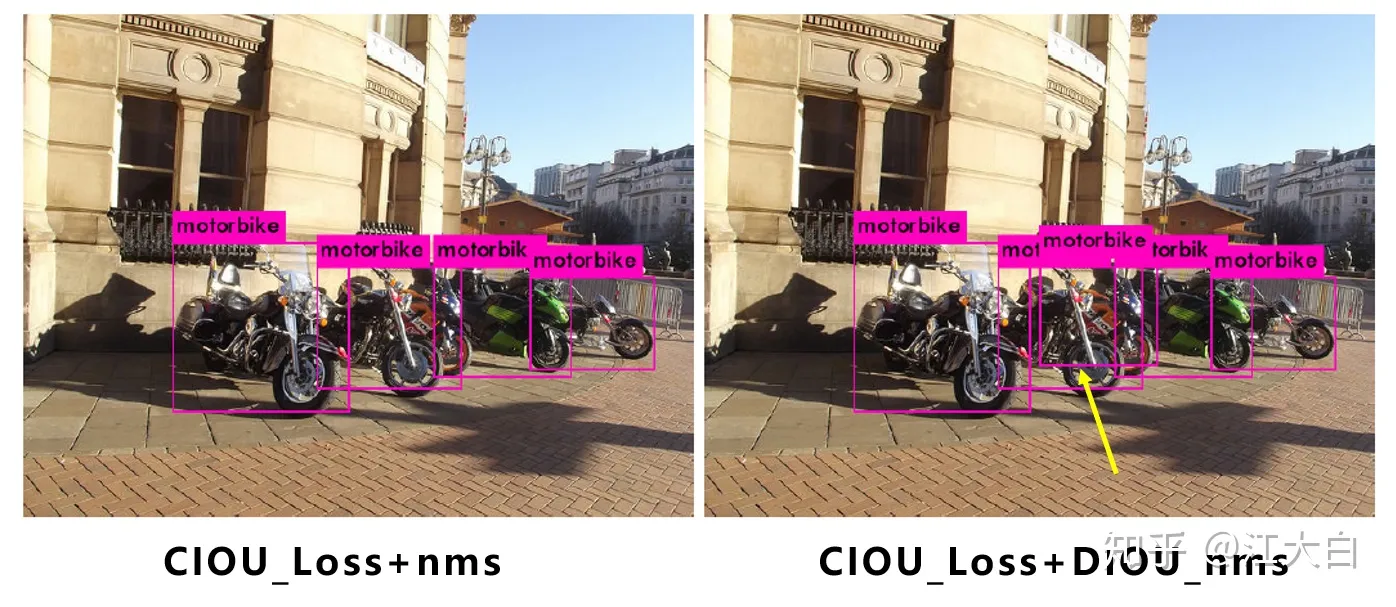
DIOU_nms
在non-max suppresion计算汇总把IOU替换为DIOU
####
YoloV5
深入浅出Yolo系列之Yolov5核心基础知识完整讲解 - 知乎
预处理
自适应锚框计算
在Yolov3、Yolov4中,训练不同的数据集时,计算初始锚框的值是通过单独的程序运行的。
但Yolov5中将此功能嵌入到代码中,每次训练时,自适应的计算不同训练集中的最佳锚框值。
自适应图片缩放
作者认为,在项目实际使用时,很多图片的长宽比不同,因此缩放填充后,两端的黑边大小都不同,而如果填充的比较多,则存在信息冗余,影响推理速度。
因此在Yolov5的代码中datasets.py的letterbox函数中进行了修改,对原始图像自适应的添加最少的黑边。
图像高度上两端的黑边变少了,在推理时,计算量也会减少,即目标检测速度会得到提升。
Backbone
Focus结构
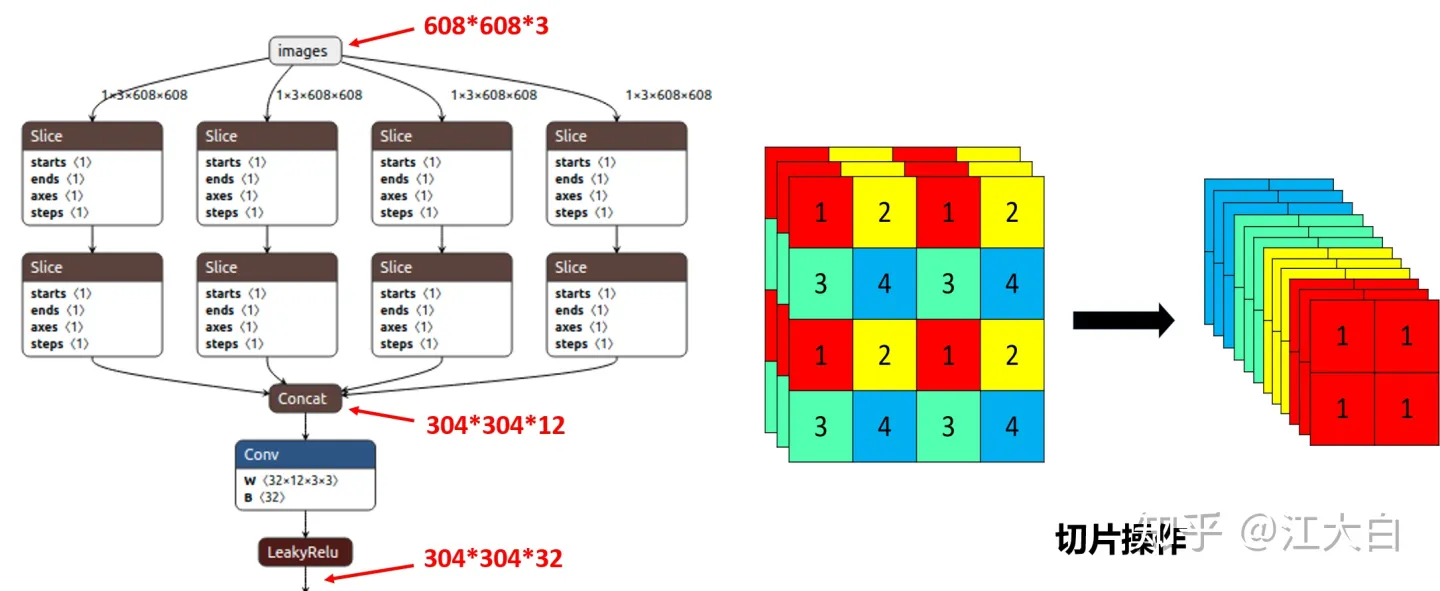
比如右图的切片示意图,443的图像切片后变成2212的特征图。
以Yolov5s的结构为例,原始6086083的图像输入Focus结构,采用切片操作,先变成30430412的特征图,再经过一次32个卷积核的卷积操作,最终变成30430432的特征图。
CSP结构
Yolov5与Yolov4不同点在于,Yolov4中只有主干网络使用了CSP结构。
而Yolov5中设计了两种CSP结构,以Yolov5s网络为例,CSP1_X结构应用于Backbone主干网络,另一种CSP2_X结构则应用于Neck中。
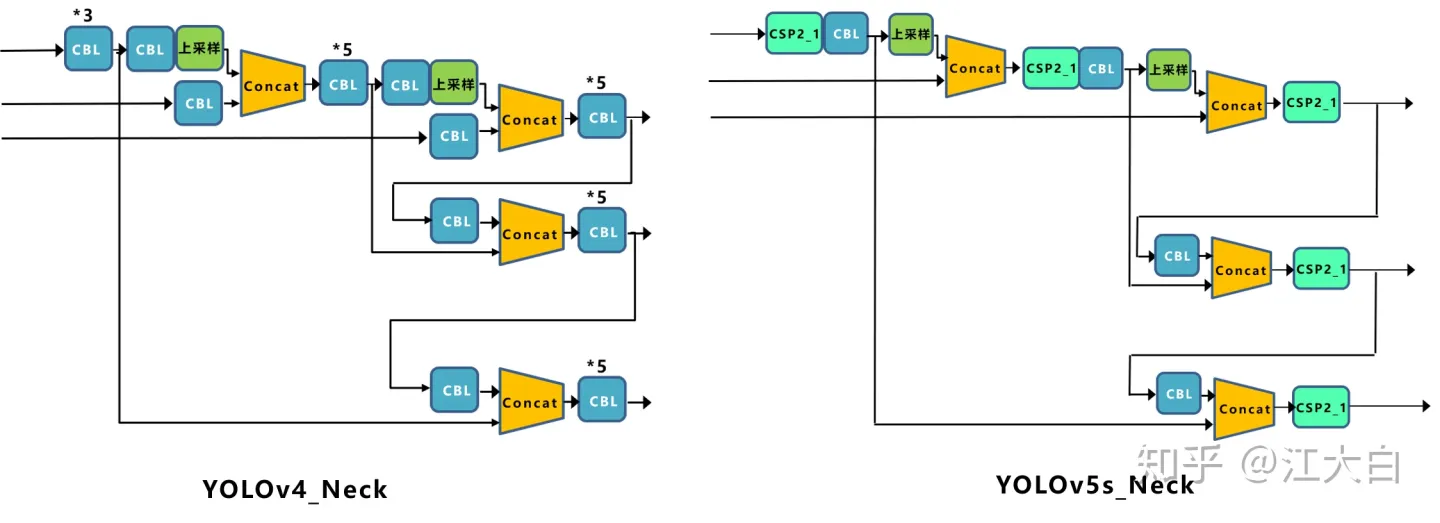
Neck
Yolov4的Neck结构中,采用的都是普通的卷积操作。而Yolov5的Neck结构中,采用借鉴CSPnet设计的CSP2结构,加强网络特征融合的能力。
输出
Loss
classification loss + bounding box loss
bounding box loss:和v4一样,Yolov5中采用CIOU_Loss
nms
和v4一样,Yolov5中采用DIOU_nms
yolo训练和调优
%run train.py --weights yolov5x.pt --cfg models/yolov5x.yaml --data data/table-dataset.yaml --device 0 --workers 0 --batch-size 4
%run detect.py --weights best.pt --img 640 --conf 0.4 --source yolov5/data/image_form --device cpu --save-crop --save-txt
%run detect.py --weights runs/train/exp12/weights/best.pt --source dataset/test_img --device cpu --save-crop --save-txt
VOC dataset format
–weights: specify pretrained models
- pretrained
--weights yolov5s.pt(recommended) - randomly initialized
--weights '' --cfg yolov5s.yaml(not recommended)
–conf: (default 0.25 –> 0.4)
confidence thresh for non max suppresion
yolo损失函数
Detector Loss function (YOLO loss) - Hands-On Convolutional Neural Networks with TensorFlow [Book]
Real-time Object Detection with YOLO, YOLOv2 and now YOLOv3 - by Jonathan Hui - Medium
neural networks - Yolo Loss function explanation - Cross Validated
####
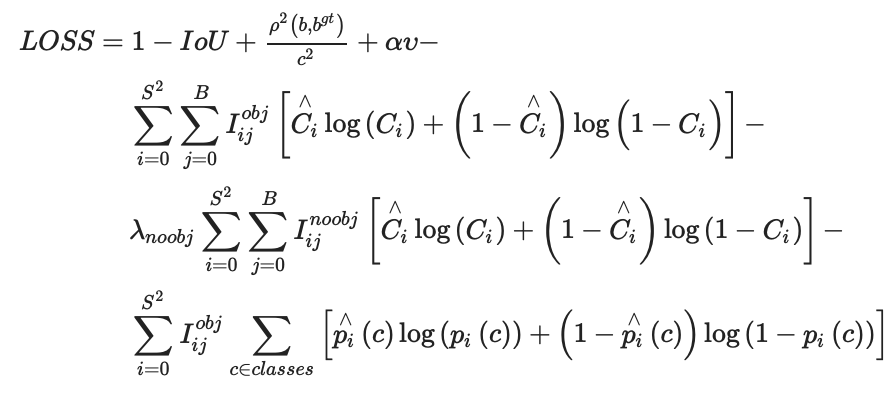
\[\begin{align} \text{LOSS} = & \text{bounding box loss} \\ & + \ \text{confidence loss} \\ & + \ \text{classification loss} \\ \end{align}\]bounding box loss (localization loss)
confidence loss
classification loss
yoloV4的损失函数:
####